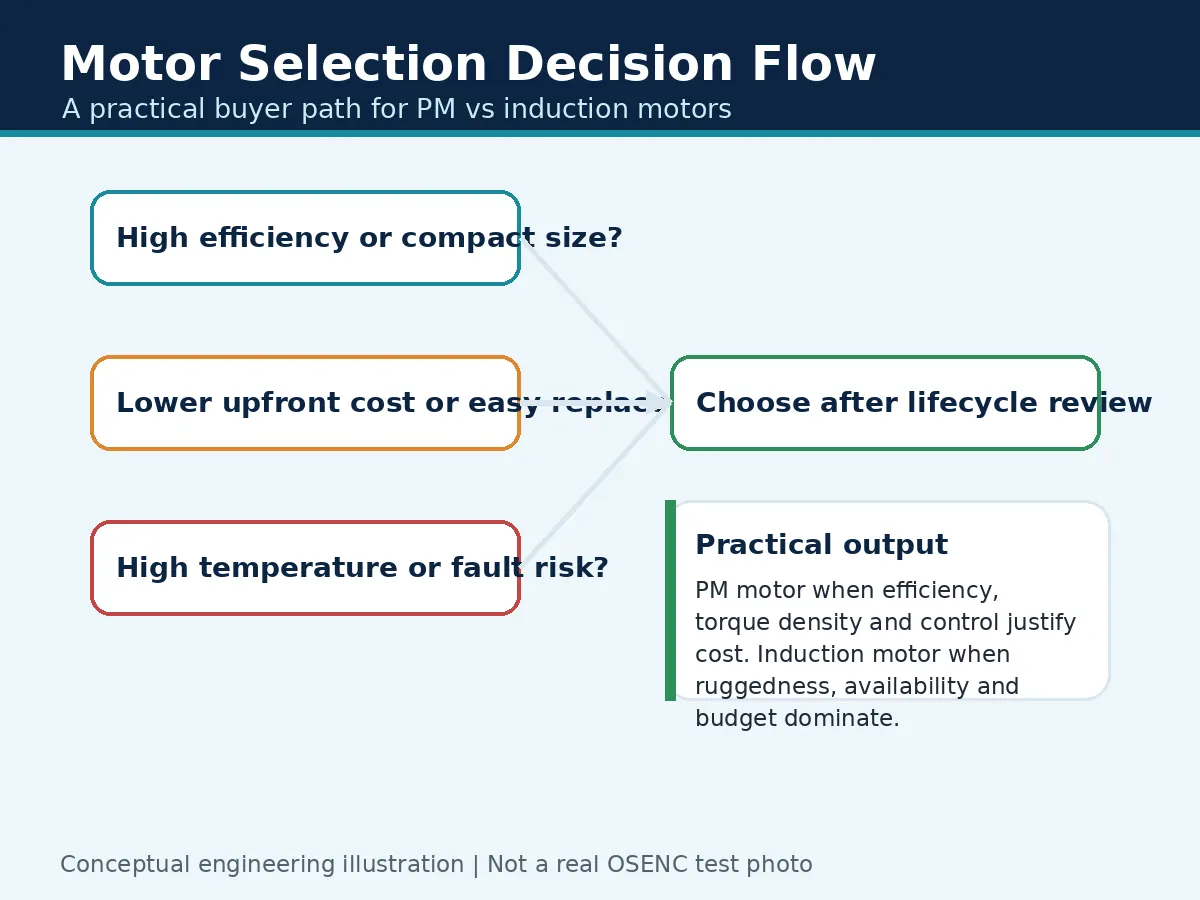
Ein Permanentmagnetmotor ist in der Regel die bessere Wahl, wenn hoher Wirkungsgrad, kompakte Bauweise, Drehmomentdichte und präzise Regelung im Vordergrund stehen. Ein Asynchronmotor ist in der Regel die bessere Wahl, wenn geringere Anschaffungskosten, robuste Bauweise, einfache Beschaffbarkeit und die Verfügbarkeit von Standard-Ersatzteilen für die Industrie wichtiger sind.
Die richtige Antwort hängt vom Gesamtsystem ab: Einschaltdauer, Drehzahlbereich, Lastprofil, Steuerung, Kühlung, Betriebstemperatur, Magnetmaterial, Wartungsfreundlichkeit und Lebenszykluskosten.

| Frage | In der Regel die bessere Wahl | Warum es wichtig ist |
|---|---|---|
| Höchster Wirkungsgrad oder höchste Drehmomentdichte | Permanentmagnet-Motor / PMSM | Der Magnetfluss des Rotors wird durch Magnete erzeugt, wodurch die elektrischen Verluste des Rotors verringert werden können und eine kompaktere Bauweise ermöglicht wird. |
| Niedrigste Anschaffungskosten | Induktionsmotor | Es werden keine Seltenerdmagnete benötigt, und Standardrahmen sind überall erhältlich. |
| Drehzahlregelung, kompakte Automatisierung oder Servosteuerung | Permanentmagnetmotor | Eine hohe Drehmomentdichte und eine präzise Regelung können die Kosten für den Regler und die Magnete rechtfertigen. |
| Pumpen, Ventilatoren, Kompressoren und Förderanlagen | Häufig Induktionsmotor | Herkömmliche Asynchronmotoren sind nach wie vor eine sinnvolle Wahl, wenn es um den Einsatz unter rauen Bedingungen geht und die Verfügbarkeit sowie die Kosten eine wichtige Rolle spielen. |
| Betrieb bei hohen Temperaturen oder störanfälliger Betrieb | Abhängig von | Bei PM-Motoren müssen die Magnetqualität und die Entmagnetisierung überprüft werden; bei Induktionsmotoren müssen weiterhin die Isolierung, die Lager und die Kühlung überprüft werden. |
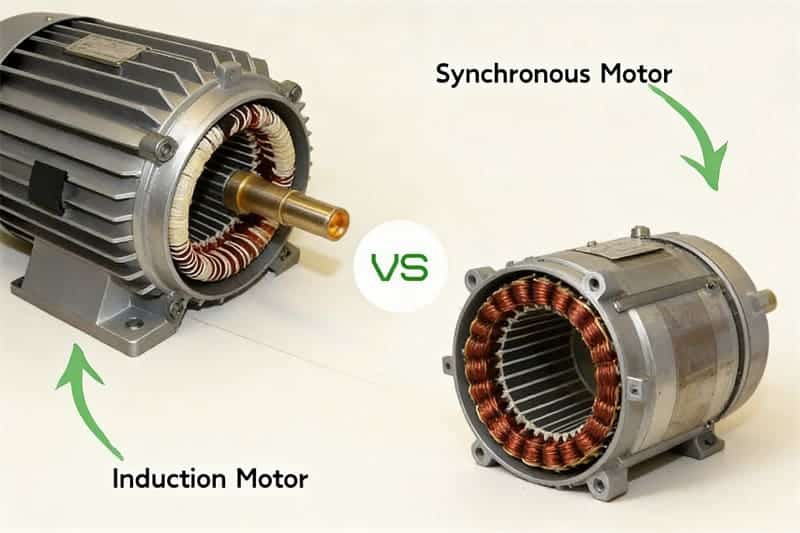
Permanentmagnetmotor vs. Induktionsmotor: Schneller Vergleich
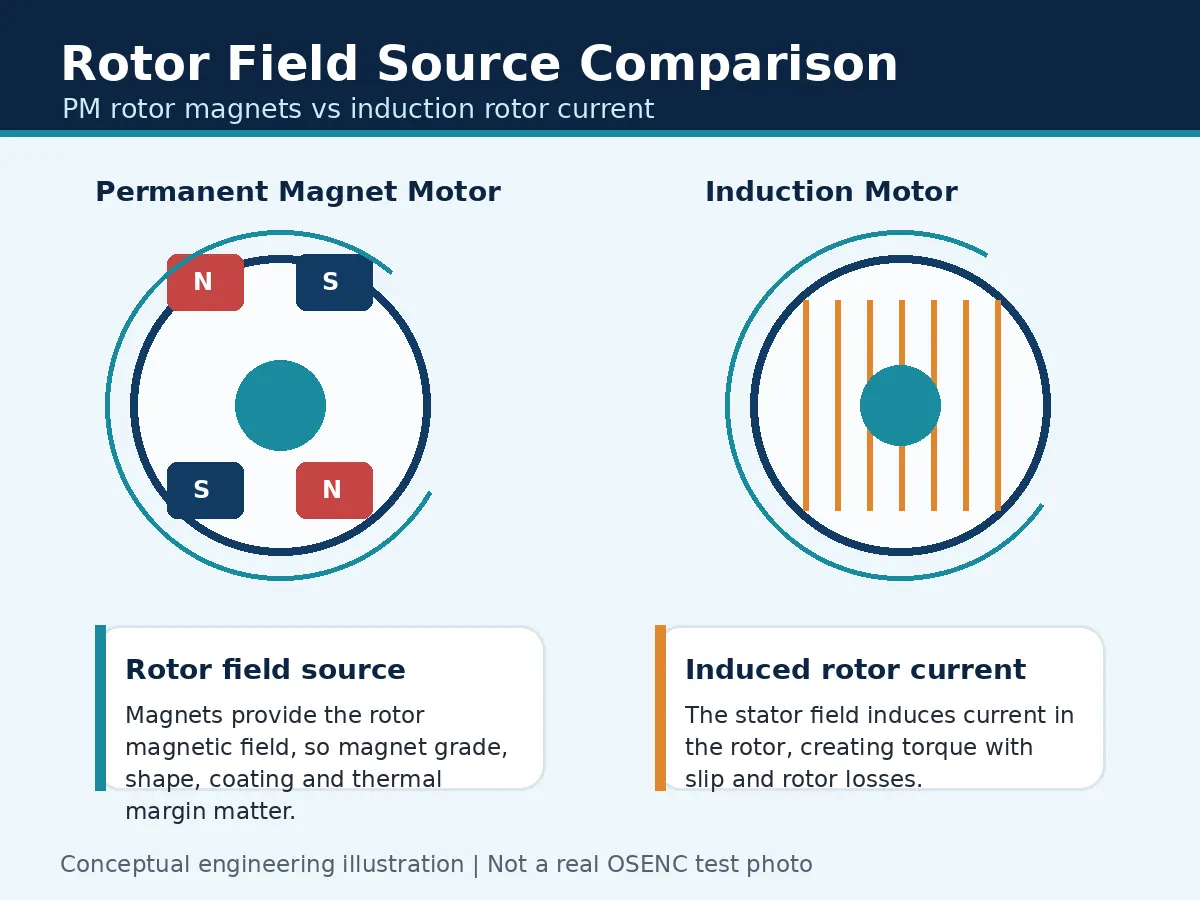
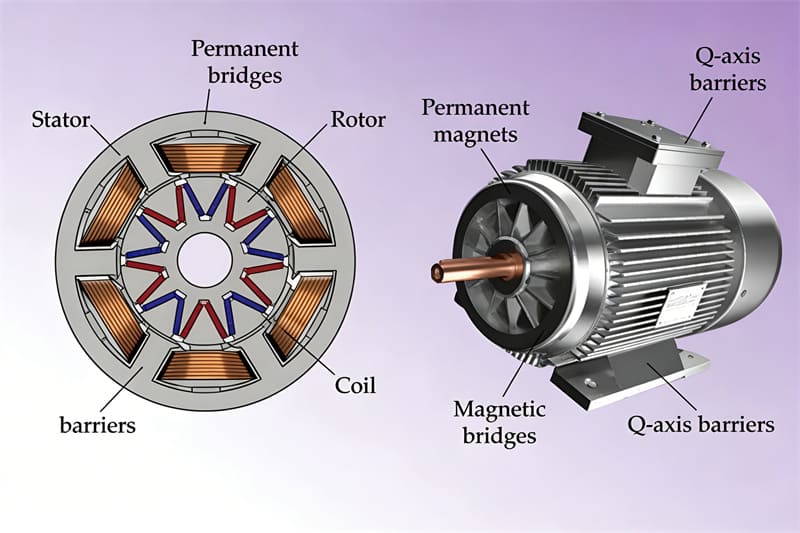
Der wesentliche Unterschied liegt in der Feldquelle des Rotors. Bei einem Permanentmagnetmotor kommen Permanentmagnete im Rotor zum Einsatz. Ein Asynchronmotor nutzt die elektromagnetische Induktion: Das Statorfeld induziert Strom im Rotor, und durch diese Wechselwirkung entsteht ein Drehmoment.
| Faktor | Permanentmagnetmotor | Induktionsmotor |
|---|---|---|
| Konstruktion des Rotors | Es werden Permanentmagnete verwendet, je nach Konstruktionsziel häufig NdFeB-, Ferrit- oder SmCo-Magnete. | Verwendet leitfähige Rotorstäbe oder Wicklungen, in denen durch das Statorfeld Strom induziert wird. |
| Effizienzverhalten | Oft besonders leistungsstark im Teillastbetrieb und in kompakten Hochleistungsausführungen. | Kann im Bereich der Nennlast effizient arbeiten, allerdings spielen Rotorverluste und Schlupf eine Rolle. |
| Steuerung | Erfordert in der Regel eine präzise Antriebssteuerung und eine Rotorpositions- oder sensorlose Regelungsstrategie. | Im Betrieb mit konstanter Drehzahl ist der Betrieb einfach; zur Drehzahlregelung kommen häufig Frequenzumrichter zum Einsatz. |
| Wesentliches Risiko | Die Kosten für die Magnete, die Beschaffung, die Beschichtung und die Entmagnetisierungsreserve müssen überprüft werden. | Vermeidet die Kosten für Permanentmagnete, hängt jedoch weiterhin von der Qualität der Laminierung, der Leiter, der Isolierung und der Kühlung ab. |
| Beste Passform | Elektrofahrzeuge, Robotik, Servosysteme, Kompaktantriebe, hocheffiziente Maschinen. | Pumpen, Ventilatoren, Förderanlagen, Klimatechnik, Kompressoren und allgemeine Industriemaschinen. |
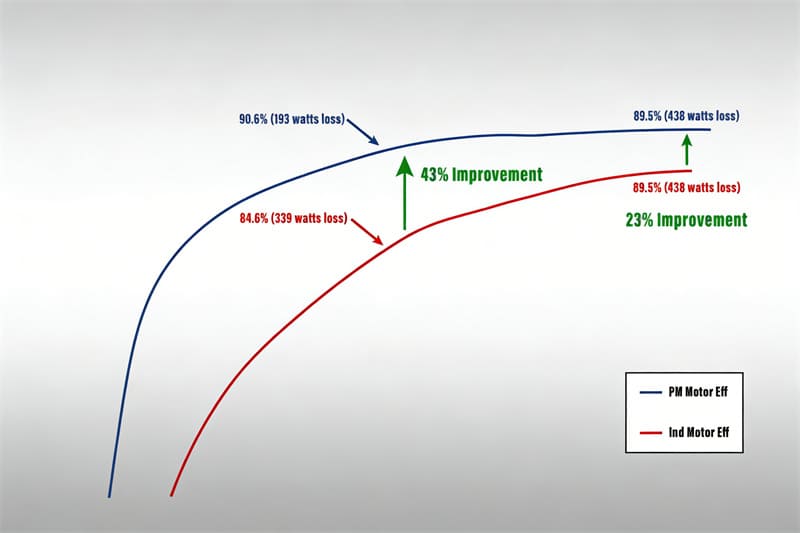
Wirkungsgrad, Rotorverluste und Einschaltdauer
Permanentmagnetmotoren können die elektrischen Verluste im Rotor reduzieren, da das Magnetfeld des Rotors durch Magnete erzeugt wird. In einem technischen Leitfaden des US-Energieministeriums wird erläutert, dass Permanentmagnetmotoren keinen Rotorstrom benötigen, um einen Magnetfluss zu erzeugen, was zu ihrem hohen Wirkungsgrad beiträgt. Induktionsmotoren nutzen Rotorstrom, daher müssen Rotorverluste und Wärmeentwicklung bei einem Wirkungsgradvergleich berücksichtigt werden.
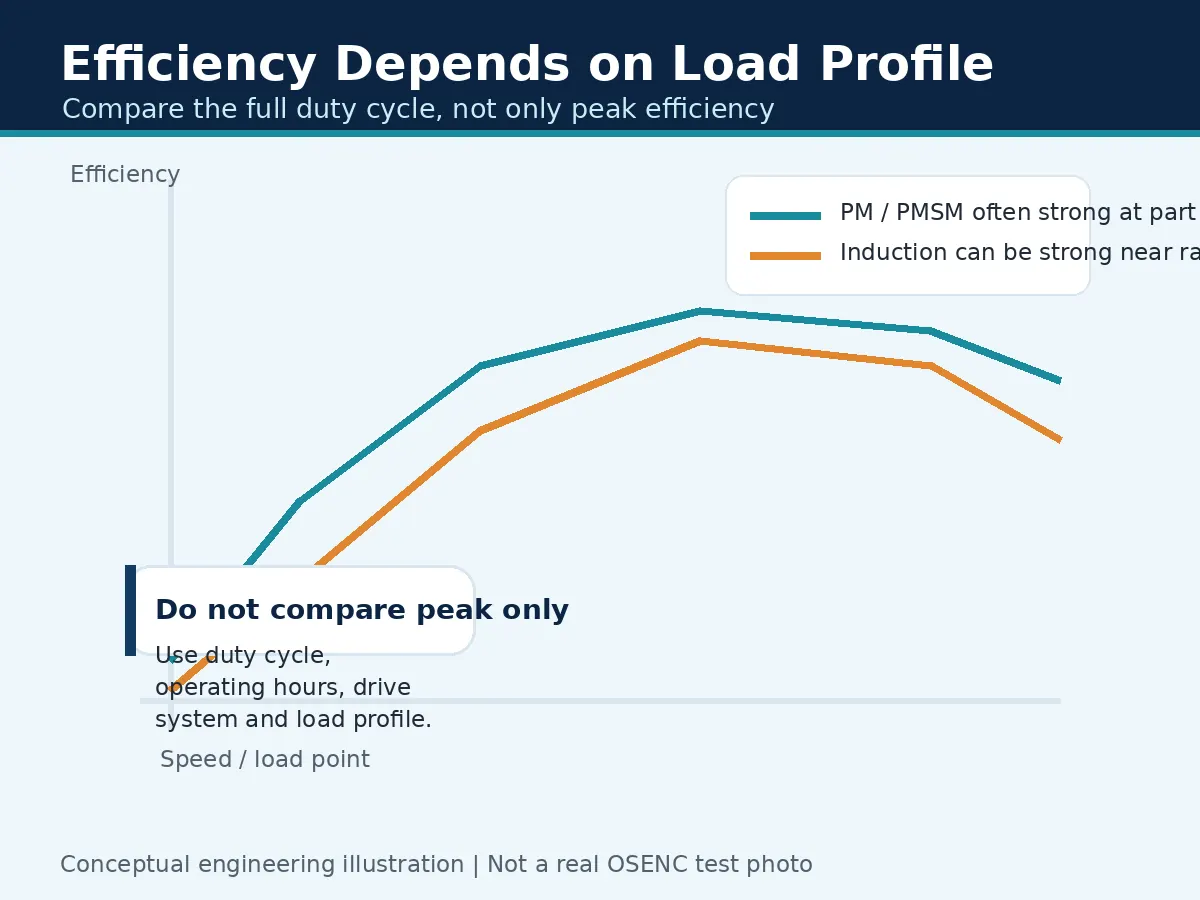
Das bedeutet jedoch nicht, dass jeder Permanentmagnetmotor automatisch kostengünstiger im Betrieb ist. Der Wirkungsgrad muss unter den tatsächlichen Betriebsbedingungen bewertet werden: beim Anlaufen, bei Nennlast, bei Teillast, bei niedriger Drehzahl, in Leerlaufphasen, unter verschiedenen Kühlbedingungen und in Abhängigkeit vom Verhalten der Steuerung.
PMSM, PM-Wechselstrommotor und dreiphasiger Permanentmagnetmotor
Viele Käufer, die nach diesem Thema suchen, vergleichen auch PMSM, Permanentmagnet-Wechselstrommotoren und dreiphasige Permanentmagnetmotoren. In der Praxis beziehen sich diese Suchanfragen oft auf Motorfamilien, bei denen Permanentmagnete im Rotor zum Einsatz kommen und der Stator über einen Regler mit Wechselstrom angetrieben wird. Ein PMSM läuft synchron mit dem rotierenden Magnetfeld des Stators, während ein Asynchronmotor normalerweise etwas unterhalb der Synchrondrehzahl läuft, da ein Schlupf erforderlich ist, um Rotorstrom und Drehmoment zu erzeugen.
Kosten: Anschaffungskosten vs. Lebenszykluskosten
Induktionsmotoren sind in der Regel im Anschaffungspreis günstiger, da sie keine Permanentmagnete benötigen und in weit verbreiteten Standardausführungen für den industriellen Einsatz hergestellt werden. Permanentmagnetmotoren sind teurer, wenn Seltenerdmagnete, eine präzise Rotorbauweise und eine fortschrittliche Steuerung erforderlich sind.
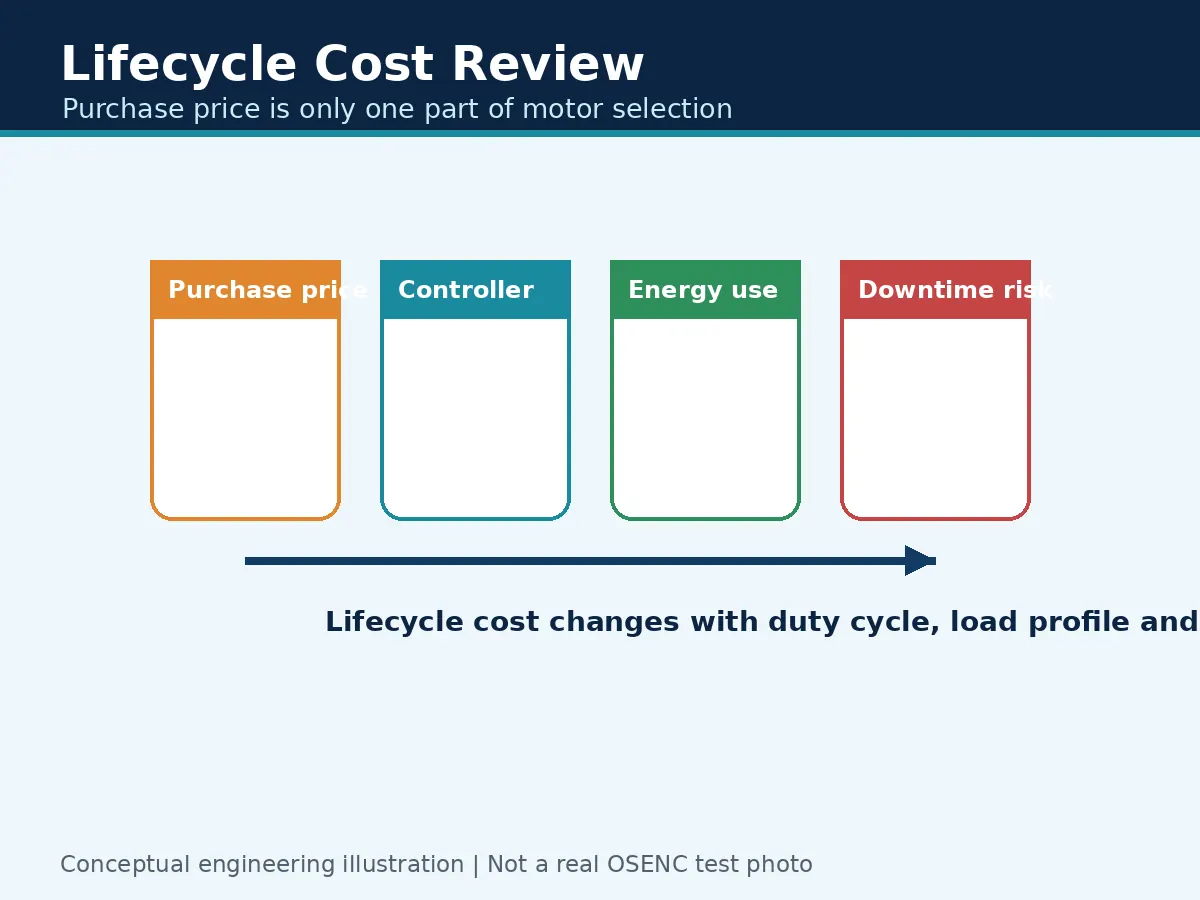
Bei Anlagen im Dauerbetrieb oder mit begrenztem Platzangebot können die höheren Anschaffungskosten eines Permanentmagnetmotors durch Energieeinsparungen, eine kompaktere Bauweise, eine höhere Drehmomentdichte oder eine bessere Bewegungssteuerung gerechtfertigt sein. Bei einfachen, robusten und kostensensiblen Anlagen bleibt ein Asynchronmotor möglicherweise die praktischere Wahl.
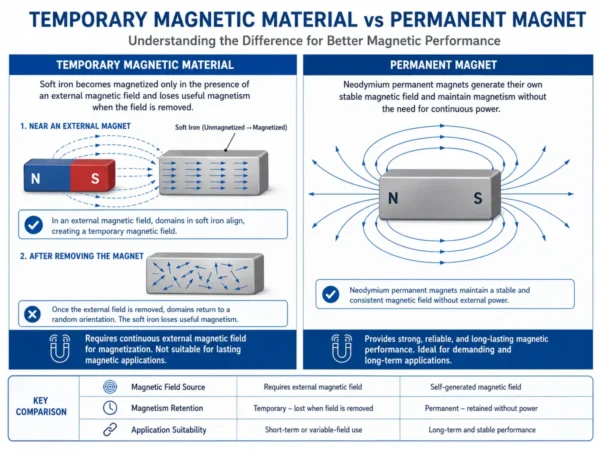
Risiken durch Hitzeeinwirkung und Entmagnetisierung
Permanentmagnetmotoren erfordern eine thermische Überprüfung, da die Magnetleistung nachlassen kann, wenn eine ungeeignete Magnetklasse verwendet wird oder wenn Betriebstemperatur, Gegenfelder, mechanische Beanspruchung oder Fehlerzustände die Auslegungsreserve überschreiten. Von NREL indexierte Forschungsergebnisse zu Permanentmagnet-Wechselstrommaschinen identifizieren die Entmagnetisierung des Rotors als eine wichtige Fehlerart, und die thermische Modellierung ist ein wesentlicher Bestandteil der Entwicklung von IPM-Motoren mit hoher Leistungsdichte.
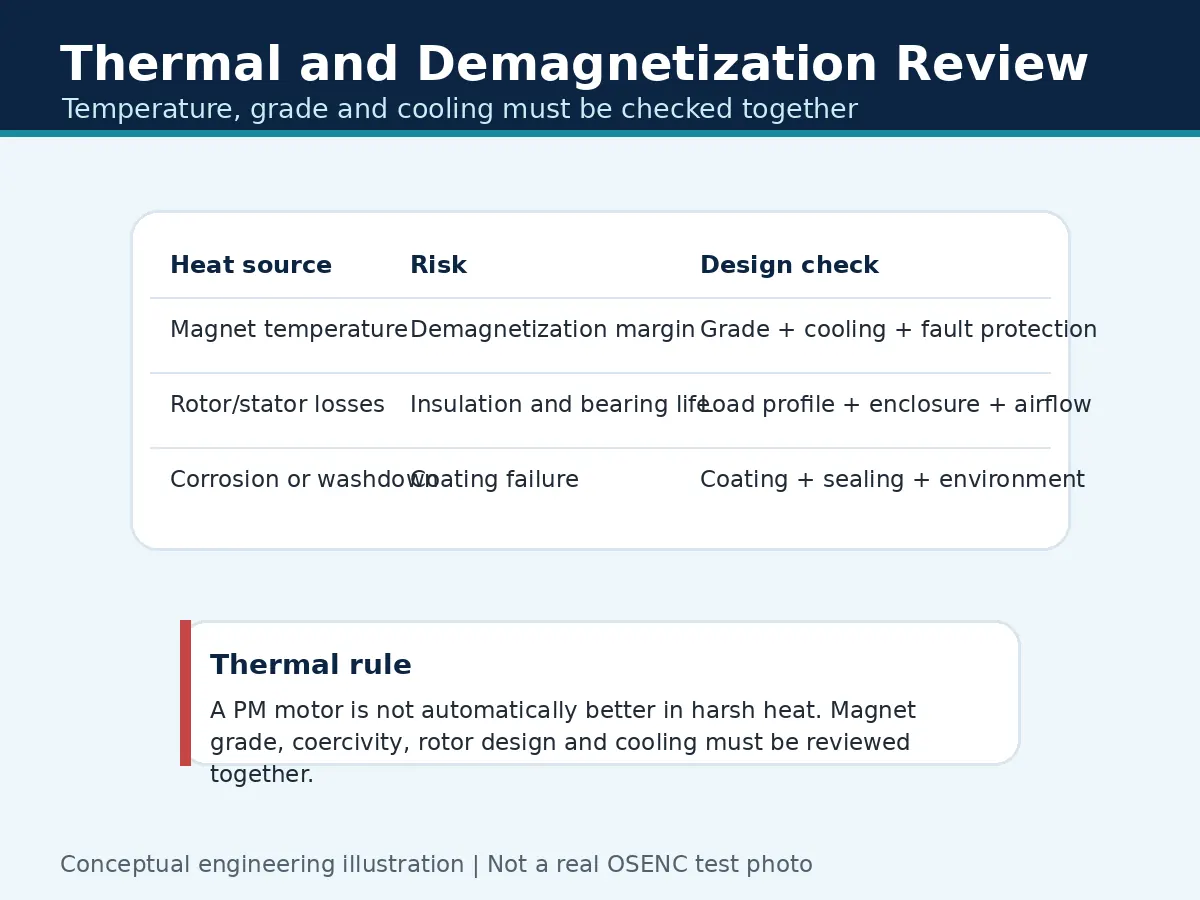
Auch Induktionsmotoren müssen auf thermische Aspekte überprüft werden. Ihre Zuverlässigkeit hängt von der Wicklungsisolierung, den Lagern, den Kühlwegen, dem Gehäuse, der Staubbelastung, der Laststabilität und dem Einschaltverhältnis ab. Wärme ist nicht nur ein Thema bei Permanentmagnetmotoren; der Unterschied besteht darin, dass bei PM-Motoren zusätzlich zur üblichen Checkliste für die Motorzuverlässigkeit auch die Magnetqualität und die Entmagnetisierung überprüft werden müssen.
Anwendungsbasierte Empfehlungen
| Anmeldung | Gemeinsame Entscheidung | Auswahlkriterien |
|---|---|---|
| Elektrofahrzeuge und kompakte Antriebssysteme | Permanentmagnet-Motor / PMSM | Eine hohe Drehmomentdichte, kompakte Abmessungen und ein hoher Wirkungsgrad können von großem Nutzen sein. |
| Robotik, Servosysteme und Automatisierung | Permanentmagnetmotor | Präzise Steuerung, schnelles Ansprechverhalten und kompakte Bauweise sind oft entscheidend. |
| Pumpen, Ventilatoren, Kompressoren und HLK | Häufig Induktionsmotor | Robustheit, Standardverfügbarkeit und geringere Anschaffungskosten könnten den Ausschlag geben. |
| Förderanlagen und allgemeine Industriemaschinen | Häufig Induktionsmotor | Eine einfache Beschaffung, Vertrautheit mit der Wartung und Standardrahmen sind von Vorteil. |
| Maßgeschneiderte Anlagen mit hohem Wirkungsgrad | Abhängig von | Vergleichen Sie die Energiekosten über den gesamten Lebenszyklus, die Motorgröße, die Steuerung, den Einschaltfaktor und das Magnetrisiko. |
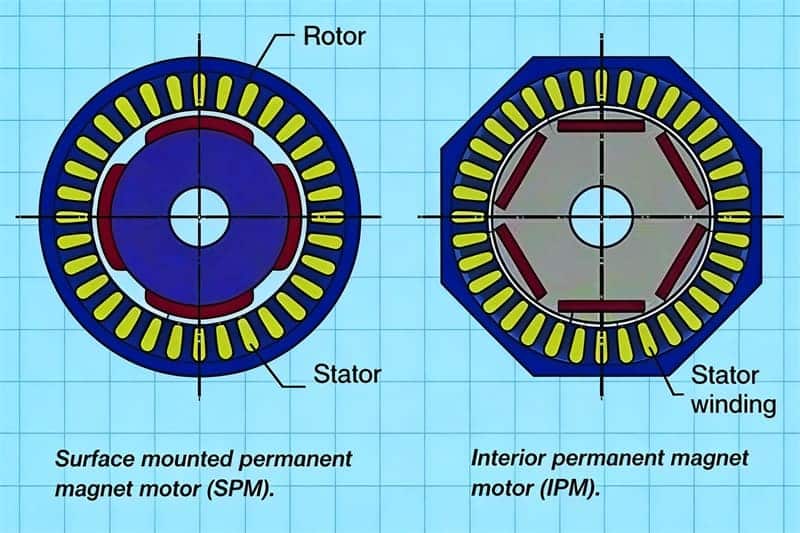
Wie sich die Konstruktion des Motormagneten auf die Leistung eines Permanentmagnetmotors auswirkt
Bei Permanentmagnetmotoren geht es bei der Auswahl des Magneten nicht nur um die Wahl des Materials. Der Motorkonstrukteur muss die Magnetgüte, die Remanenz, die Koerzitivfeldstärke, die Temperaturklasse, die Beschichtung, die Form, die Toleranz, die Magnetisierungsrichtung, den Luftspalt, die Rotorhalterung und die Montageart berücksichtigen.
Magnetgüte und Koerzitivfeldstärke
Eine höhere magnetische Festigkeit kann die Drehmomentdichte verbessern, allerdings muss die Materialgüte auf die Motortemperatur und das Risiko einer Entmagnetisierung durch das Magnetfeld abgestimmt sein. Eine höhere Koerzitivfeldstärke kann erforderlich sein, wenn der Motor hohen Temperaturen, Fehlerströmen, starker Feldabschwächung oder anspruchsvollen Betriebszyklen ausgesetzt ist.
Form, Toleranz und Luftspalt
Die Toleranzen hinsichtlich Dicke, Breite, Fase und Länge des Lichtbogenmagneten können die Flussverteilung, die Gleichmäßigkeit des Luftspalts, das Ruckdrehmoment, die Schwingungen, die Montageausbeute und das Risiko von Beschichtungsschäden beeinflussen.
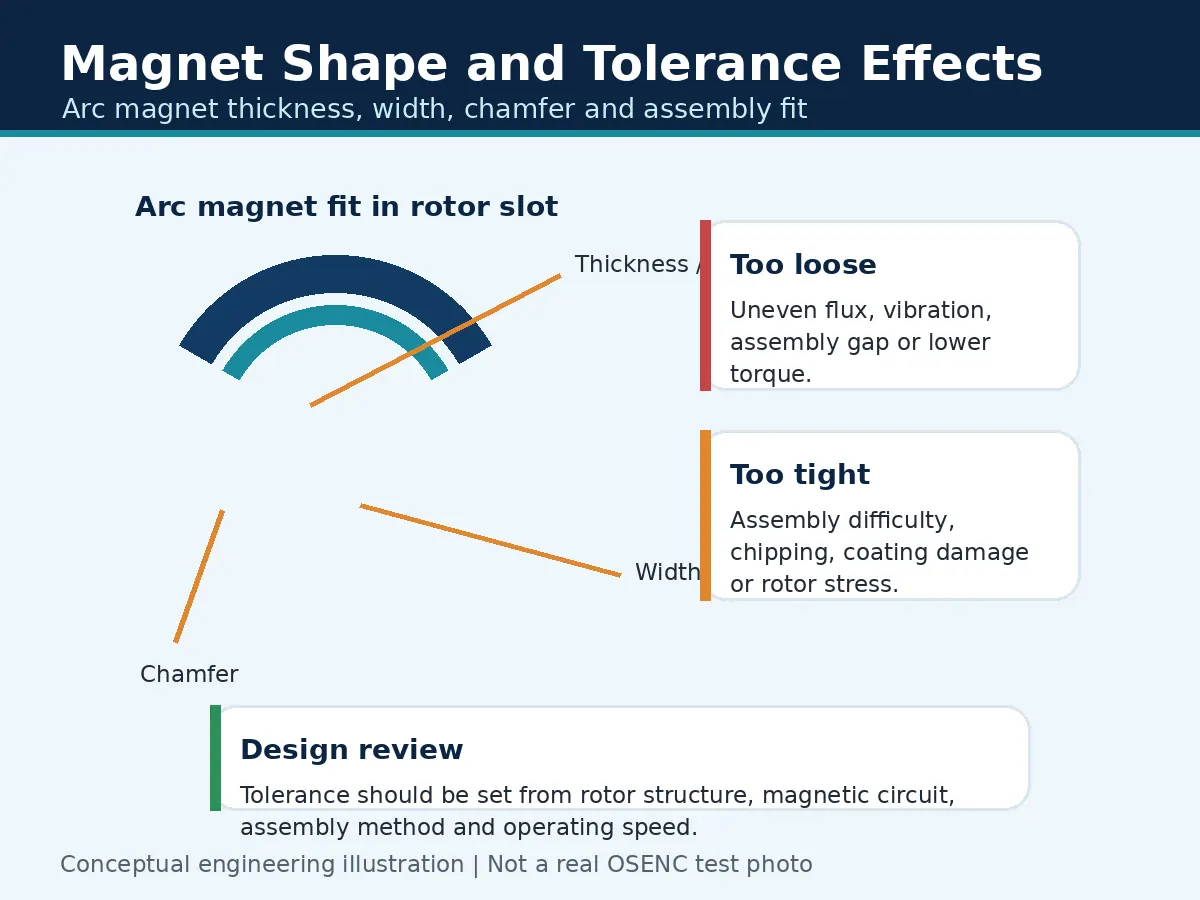
OSENC kann Sie bei individuellen Anforderungen an Motormagnete unterstützen, darunter die Auswahl der NdFeB-Magnetgüte, die Überprüfung der Beschichtung, die Magnetisierungsrichtung, die Form des Lichtbogenmagneten, die Toleranzen bei der Rotormontage sowie die Abstimmung zwischen Muster und Serienfertigung.
So treffen Sie die richtige Wahl: Ein praktischer Entscheidungsleitfaden
- Legen Sie Drehmoment, Leistung, Drehzahlbereich und Einschaltdauer fest.
- Vergleichen Sie den Wirkungsgrad bei tatsächlichen Lastpunkten und nicht nur bei Nennlast.
- Berücksichtigen Sie die Kosten für Motor, Steuerung, Kühlung, Wartung und Ausfallzeiten.
- Überprüfen Sie die Betriebstemperatur, das Gehäuse, Staub, Korrosion und Vibrationen.
- Bei PM-Motoren sind die Magnetgüte, die Beschichtung und die Entmagnetisierungsreserve zu überprüfen.
- Bei Induktionsmotoren sind die Isolierung, die Lager, die Kühlung und die Verfügbarkeit von Rahmen zu überprüfen.
Checkliste für die Angebotsanfrage zu kundenspezifischen Motormagneten
Falls in Ihrem Projekt Permanentmagnete in einem Rotor zum Einsatz kommen, halten Sie bitte die folgenden Informationen bereit, bevor Sie ein individuelles Angebot anfordern. Dies trägt dazu bei, den Schriftverkehr zu reduzieren und die Besprechung der Magnetkonstruktion realistischer zu gestalten.
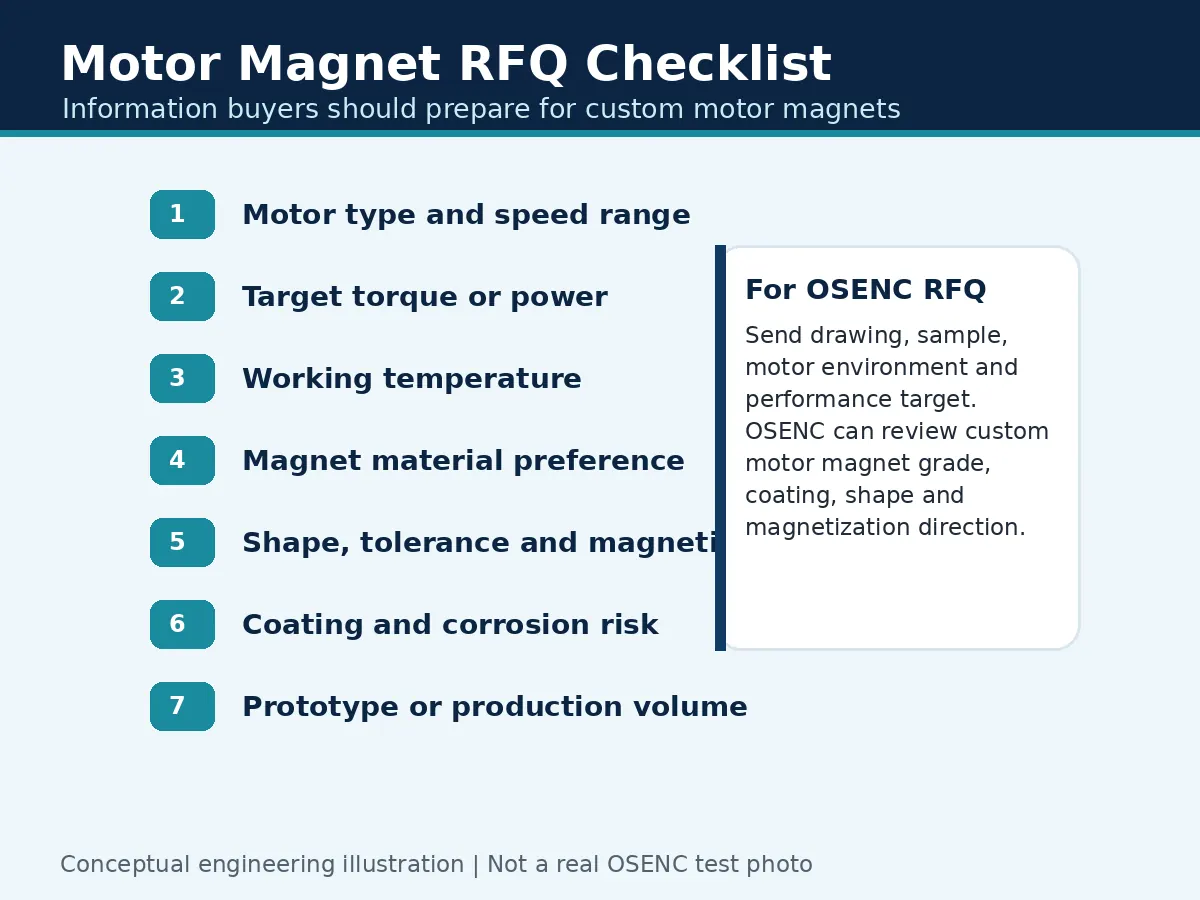
- Motortyp: PMSM, BLDC, PM-Gleichstrommotor, Generator oder kundenspezifische Baugruppe.
- Soll-Drehmoment, Leistung, Drehzahlbereich und Einschaltdauer.
- Betriebstemperatur und maximale Temperaturbelastung.
- Bevorzugtes Magnetmaterial: NdFeB, SmCo oder Ferrit.
- Zeichnung, Muster, Geometrie der Rotorschlitze oder Form des Zielmagneten.
- Magnetisierungsrichtung, Beschichtung, Toleranz und Prüfvorgaben.
- Prototypenmenge, Produktionsmenge und Lieferziel.
- Etwaige Korrosions-, Reinigungs-, Vibrations- oder Sicherheitsauflagen.
Benötigen Sie maßgefertigte Magnete für einen Permanentmagnetmotor?
OSENC kann ähnliche maßgeschneiderte Magnetlösungen anbieten, die auf Ihrer Zeichnung, Ihrem Muster, Ihrer Anwendungsumgebung, Ihren Leistungszielen und Ihren Testanforderungen basieren. Teilen Sie uns bitte Ihren Motortyp, die Rotorkonstruktion, die Magnetform, die angestrebte Güteklasse, die Beschichtungsanforderungen und die Betriebstemperatur mit, damit das Magnetdesign ordnungsgemäß geprüft werden kann.
Wenden Sie sich an OSENC, wenn Sie Unterstützung bei Motormagneten benötigenFAQ
Was ist der Hauptunterschied zwischen einem Permanentmagnetmotor und einem Induktionsmotor?
Bei einem Permanentmagnetmotor werden Magnete im Rotor verwendet, um das Rotormagnetfeld zu erzeugen. Ein Asynchronmotor nutzt den im Rotor induzierten Strom, sodass er normalerweise mit Schlupf betrieben wird. Dies wirkt sich auf Wirkungsgrad, Drehmomentdichte, Kosten, Regelungsbedarf und thermisches Verhalten aus.
Ist ein Permanentmagnetmotor effizienter als ein Induktionsmotor?
Ja, das ist oft der Fall, insbesondere bei kompakten Motoren, Motoren mit variabler Drehzahl oder im Teillastbetrieb. Das Endergebnis hängt jedoch weiterhin von der Motorkonstruktion, der Steuerung, der Kühlung, dem Lastprofil und den Betriebsstunden ab.
Warum sind Induktionsmotoren in der Regel günstiger?
Herkömmliche Asynchronmotoren benötigen keine Permanentmagnete aus Seltenen Erden und sind in vielen gängigen Industriebaugrößen erhältlich. Ihr niedrigerer Anschaffungspreis kann attraktiv sein, wenn Größe und Teillastwirkungsgrad keine wesentlichen Einschränkungen darstellen.
Haben Induktionsmotoren Dauermagnete?
Herkömmliche Induktionsmotoren verwenden keine Permanentmagnete. Ihr Rotormagnetfeld entsteht durch elektromagnetische Induktion aus dem Statorfeld.
Welcher Motortyp eignet sich besser für Elektrofahrzeuge oder die Robotik?
Permanentmagnetmotoren (PMSM) werden häufig bevorzugt, wenn eine hohe Drehmomentdichte, kompakte Abmessungen, Drehmoment bei niedrigen Drehzahlen und eine präzise Regelung wichtig sind. In einigen Systemen kommen nach wie vor Induktionsmotoren zum Einsatz, um die Abhängigkeit von Seltenen Erden zu verringern oder ein Gleichgewicht zwischen Kosten und Betriebsverhalten herzustellen.
Welche Informationen muss ich für maßgefertigte Motormagnete übermitteln?
Bitte geben Sie den Motortyp, das Solldrehmoment oder die Sollleistung, den Drehzahlbereich, die Betriebstemperatur, die Rotorzeichnung, die Magnetform, die Toleranz, die Magnetisierungsrichtung, die Anforderungen an die Beschichtung, das Korrosionsrisiko sowie die Stückzahl für den Prototyp oder die Serienfertigung an.
Hinweise zu Beweisen und Vertrauen
Dieser überarbeitete Artikel verwendet eine zurückhaltende Fachsprache. Externe öffentliche Quellen werden lediglich zur Untermauerung allgemeiner technischer Hintergrundinformationen herangezogen, nicht jedoch als von OSENC verifizierte Testdaten oder OSENC-Kundenbeispiele. Zu den nützlichen Referenzen zählen das Dokument des US-Energieministeriums zum technischen Support für Elektromotoren, die Forschungs- und Entwicklungsnotizen des DOE zu Elektromotoren, die vom NREL indexierte Forschung zu Wechselstrommaschinen mit Permanentmagneten sowie die EU-Verordnung 2019/1781 über Effizienzanforderungen für Elektromotoren.